штатив, датчик обертання DT148А, датчик відстані DT 020-1, набір важків, нитка, АЦП NOVA LINK, ПК.
Програмне забезпечення:
MultiLab.
Теоретичні відомості
Моментом інерції механічної системи відносно нерухомої осі називається величина I, яка дорівнює сумі добутків мас n матеріальних точок системи на квадрати їх відстаней до вісі обертання:
де: mi — маса i-ї точки, ri— відстань від i-ї точки до вісі обертання.
Момент інерції можна визначити експериментально, вимірюючи кутове прискорення тіла і момент сил, прикладених до системи:
де M = F·l – момент сили, прикладеної до тіла; ε – кутове прискорення системи тіл.
Плечем сили в експерименті буде радіус шківа, до якого прикріплено досліджуване тіло. Прикладену до тіла силу можемо визначити з виразу F = m(g - a), де a – прискорення поступального руху важків.
Налаштування експерименту
1. Установіть на столі штатив, закріпіть на ньому зверху датчик обертання і знизу датчик відстані.
2. Урівноважте на датчику обертання важки.
3. Перекиньте через середній шків датчика обертання нитку і прикріпіть до нитки однакові важки.
4. Розташуйте датчик відстані так, щоб він міг реєструвати рух важка, підвішеного до нитки.
5. З’єднайте АЦП з USB входом ПК.
6. З’єднайте датчики обертання з АЦП, використовуючи перший вхід для датчика відстані, а другий вхід – для АЦП.
2. Відкрийте вкладку Реєстратор – Налаштування Реєстратора, і переконайтеся, що датчики розпізнано і підключено до входів.
3. Оберіть на випадаючому вікні біля назви датчика відстані кнопку Налаштування датчика .
4. У першій вкладці вікна, що випало, оберіть пункт Відстань наближення.
5. В останній вкладці оберіть пункт Установити поточне значення як нуль.
6. Натисніть Ok.
7. Оберіть біля назви датчика обертання на випадаючому вікні кнопку Налаштування датчика .
8. В першій вкладці вікна, що випало, оберіть пункт Кут (радіани).
9. Натисніть Ок.
10. У вікні налаштувань датчика натисніть Далі.
11. Оберіть в списку частоту вимірів – 25 вимірів за секунду.
12. Натисніть Далі.
13. Оберіть час вимірів – 8 с.
14. Натисніть Закінчити.
Хід виконання дослідження
1. Підніміть важок, що буде здійснювати поступальний рух, у верхнє положення до рівня, коли він не буде заважати обертальному руху важеля з насадженими на ньому важками.
2. Притримуючи важок, установіть на ньому додатковий вантаж.
3. Натисніть кнопку Пуск .
4. Відпустіть важок і дочекайтеся завершення запису даних.
5. Збережіть результат експерименту.
6. Повторіть експеримент двічі, щоразу збільшуючи масу вантажу, що здійснює поступальний рух.
7. Збережіть результат експерименту.
Демонстрація виконання дослідження
Аналіз даних експерименту
1. Відкрийте графік першого експерименту.
2. Виокреміть на отриманому графіку відстані ділянку, яка відповідає прискореному руху важків і позначте його Першим і Другим курсором.
3. Виконайте утинання графіка.
4. Установіть Перший курсор і Другий курсор на кінці графіка h(t).
5. Оберіть Майстер аналізу і у першій вкладці Апроксимація – Поліном 2 степеня.
6. Прочитайте рівняння під графіком. Множник біля змінної у квадраті відповідає значенню а/2.
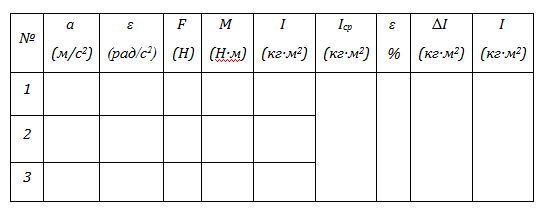
7. Запишіть значення прискорення а у таблицю.
8. Установіть Перший і Другий курсори на кінці графіка φ(t).
9. Оберіть Майстер аналізу у першій вкладці Апроксимація – Поліном 2 степеня.
10. Переглянути приклад проведення аналізу.
11.Прочитайте рівняння під графіком. Множник біля змінної у квадраті відповідає значенню ε/2.
Приклад проведення аналізу
12. Запишіть значення ε у таблицю.
13. Почергово відкриваючи дані другого і третього експериментів, виконайте попередні кроки.
14. Розрахуйте значення сили, прикладеної до системи тіл, для кожного експерименту, враховуючи прискорення руху важка a, і занесіть його у таблицю.
15. Момент сили M для кожного експерименту, враховуючи радіус шківа (0,015 м), і занесіть отримані значення у таблицю.
16. За отриманими експериментальними значеннями розрахуйте момент інерції системи тіл.
17. Визначте середнє значення моменту інерції системи тіл.
18. Розрахуйте відносну і абсолютну похибку вимірів і обчислень, враховуючи, що відносна похибка датчика відстані складає 1,5%, а датчика обертання – 0,01%.
19. Запишіть значення моменту інерції тіла з урахуванням похибок.



 .
. .
. і Другим
і Другим  курсором.
курсором. і у першій вкладці Апроксимація – Поліном 2 степеня.
і у першій вкладці Апроксимація – Поліном 2 степеня.